05. BFS: Shortest Path
BFS: Shortest Path
The final step is to print the shortest path that the robot has to take in order to travel from start to goal. You will need to record each action that the robot should take(ex: turning left < ) and store all the actions in a policy 2D vector.
Hint
Here’s the output policy vector generated after running the code:
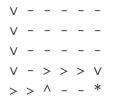
You can see the different actions( v - > - < - ^ ) that the robot has to take in order to reach the goal marked with the * . Some of these cells will never be visited by the robot and are marked with an - .
Now, go ahead and modify the search function to generate the policy 2D Vector.
Start Quiz: